Game Description
The game was a head-to-head matchup between robots as they gathered ping-pong balls off of the playing field floor and deposited them into bins to score points.
The playing field was circular, with a diameter of 8', and bounded by a 3.5" tall wall (Figure 1).
The playing field was circular, with a diameter of 8', and bounded by a 3.5" tall wall (Figure 1).
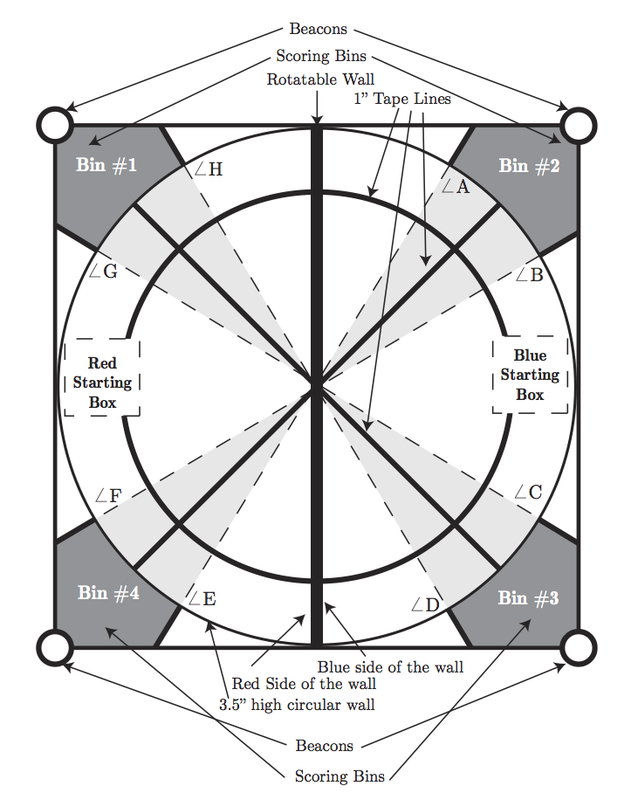
Figure 1: Playing Field
Four scoring bins were placed 90 degrees apart along the circumference of the playing field. Each bin had a beacon emitting a modulated IR signal with a 50% duty cycle square wave. Each beacon's signal was modulated to a different period so the bins could be differentiated.
Black tape was laid to form two diameters, which connected opposite bins, and a circle concentric with the playing field. The three pieces of tape served as a guide for robots so they might roughly locate themselves on the playing field.
The competing robots were separated by a 5" tall wall that was free to rotate when acted on by the robots (Figure 2). The wall was positioned 2" above the playing field floor so that it could pass over ping-pong balls as the wall rotated.
Two steel plates were placed inside the wall so that robots could pull the wall.

Figure 2: Rotating Wall
Game Play
- A round of play lasted 2 minutes. Robots stopped all movement after 2 minutes.
- Ping-pong balls in scoring bins at the end of the round on the Red side of the wall scored +2 points for the Red team. Ping-pong balls in scoring bins on the Blue side of the wall scored +2 points for the Blue team. Note that the wall rotated, so the bins belonging to a team changed as the wall position changed.
- Ping-pong balls on the floor at the end of the round on the Red side of the wall scored -1 points for the Red team. Ping-pong balls on the floor on the Blue side of the wall scored -1 points for the Blue team.
- At the end of the round, ping-pong balls either in a robot or with any portion of the ball under the rotating wall did not count against either team.
- At the end of the round, if the rotating wall laid within the light grey region of Figure 1 (defined by angle positions of A-B, C-D, E-F, G-H), the scoring bins at the ends of the wall were taken out of play and did not count for either side.
- In case of a tie at the end of a round, the robot with highest bin score won.
Project Rules & Requirements
- Serial Peripheral Interface (SPI) communication was required to receive information from the playing field. The information transmitted included the number of balls in each bin and the current angle of the rotating wall.
- The robot was required to be a stand-alone entity. It had to be autonomous and untethered. Battery power was required.
- The robot was required to execute code on the provided microcontroller.
- The only parts of the robot that were allowed to touch the playing field surface were wheels, ball transfers, and slippery supports used to balance the robot.
- The robot was limited to a volume of 1 cubic foot. The volume was defined as the smallest bounding box (rectangular prism) that entirely enclosed the robot.
- The robot was required to, under software control, identify itself as playing either the Red side or the Blue side.
- Each Robot was required to be constructed as part of ME218B. It could not be based on a commercial or otherwise pre-existing platform.
- Teams were limited to a $150 budget.
- Motors were supplied to provide locomotive force to the robots. These motors were required to drive anything that transferred force to the ground.
- No part of the robot could extend beyond its side of the rotating wall.
- The robot was required to start and remain in one piece throughout the round.
- The robot could not alter the condition of the playing field or the ping-pong balls.
- The robot could not jam its opponent's sensors.
- No liquids, gels, or aerosols were allowed.
